This site is a personal collection of my diverse interests, including documenting important Cold War-era bunkers and sites that are at risk of being lost. I hope to make this space both educational and helpful for anyone working on or interested in similar projects.

USAF Alconbury – Building 210

Cambridgeshire County Council Emergency HQ Bunker with virtual tour

Classic Blaupunkt Radio Bluetooth Conversion.

Teufelsberg NSA listening station

Objekt 5001 – Erich Honecker Bunker

Norfolk County Hall – County Emergency Headquarters Bunker

1966 Sea Blue VW Beetle

Crowborough RGHQ

USAF Alconbury – Airfield Site
RAF Barnham 94th Maintenance Unit (Nuclear Bomb Store) photos and virtual tour

PunKtuation are planning a come-back

Vox Escort lead 50W combo

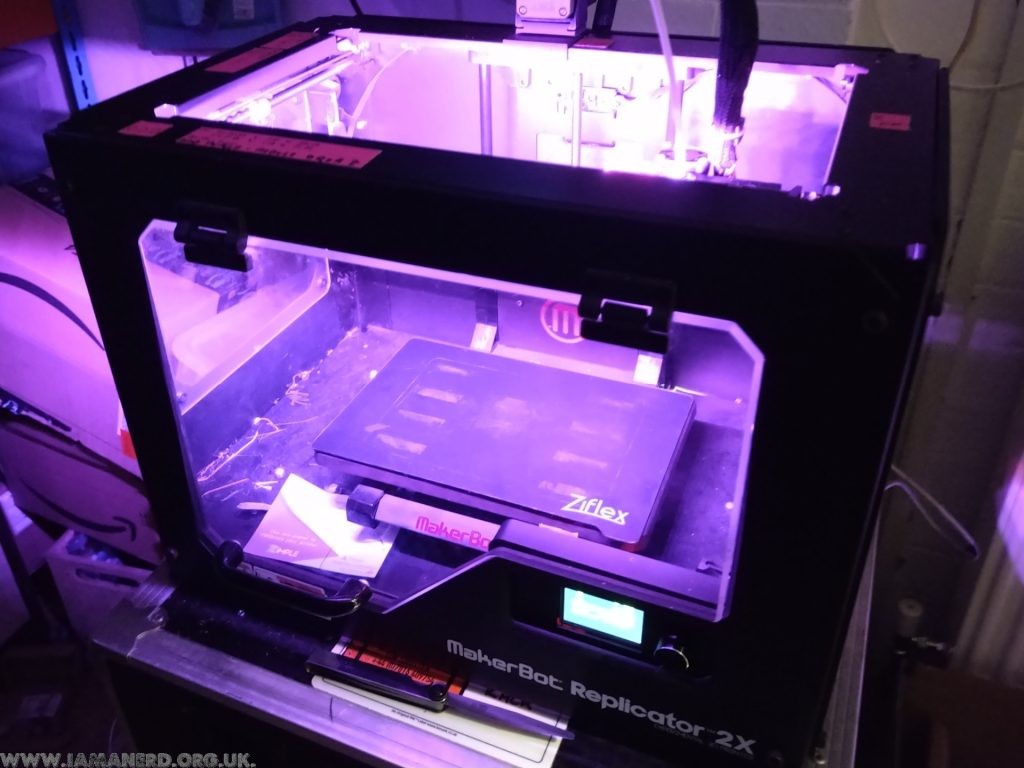
Makerbot Replicator 2X BTT SKR 1.4 Turbo
Adding an additional fan on BTT SKR 1.4 Turbo using Marlin

RWD Automatic Zetec conversion.

Press to continue…

Econoline throttle cable adapter bracket

D&D disk brake conversion and master cylinder upgrade kits – My experience with them.

Raspberry Pi 3 (stretch) and Wirelessthings sensors

Beets installation on Synology NAS

1964 Ford Econoline
Raspberry Pi 3 (Jesse) and Wirelessthings sensors

1972 Mk3 Ford Cortina for sale

Wireless Hot Water Temperature sensor

Getting started with wirelessthings sensors and a Raspberry Pi

Hog 1000 backlight replacement (retrofit Cold Cathode with LED)

Inertia seatbelts in a Mk3 Cortina

How to make the best quality homebrew beer from a kit

Stop helping the “Like Harvesters”

Milestone brewing company – Green Man – beer kit review

1972 Mk3 Ford Cortina

What does your starsign say about you?

1967 Electric sunroof Type 34 Razoredge Karmann Ghia

Dan Williams Allstars

Press To Continue the lost songs…

DIY Mashtun

Vw Type 34 razoredge Ghia sunroof motor shaft

VW Type 34 Razoredge Sunroof cables

Another failed raspberry Pi Sdcard slot…
