I made this conversion for my Blaupunkt Manheim Radio (but it may work for others) using 3D printed parts I designed and a Bluetooth Amplifier PCB.
Do not attempt this if you are not good with electronics or don’t want to damage your radio.I take no responsibility for any damage you cause, Ensure you use the correct gauge wires and add an external fuse.
I used this Bluetooth Amplifier PCB https://amzn.to/444DJby but any similar one should work, be sure to check reviews as the first version I bought wasn’t as good quality as this one.
Strip the radio, removing the old PCB and controls. leave the buttons and display in place.
Move the Volume pot into the Tuning pot position.
Mount the PCB Bracket using the original Tuner collar and nut.
Heat the end of the shaft adapter for a few seconds and push onto the shaft of the new volume pot, when cool thread the shaft through the hole.
Screw PCB into the adapter.
Finally wire up the new PCB, I didn’t use the supplied cable, I soldered 12v and Gnd feeds to the PCB.
Ensure you fuse it externally, I cannot stress this enough.
You can wire the original bulb up to the 12v feed or replace it with some LED strip as I did, be sure to only give the radio a switched 12v supply and don’t leave unattended when in use.
I am really pleased with mine and have used it for thousands of miles now, I would thoroughly recommend good quality speakers (I used these JBLs in kick panels https://amzn.to/4ksJANA ) as this makes a world of difference, I also fitted an sub under the rear seat (this one https://amzn.to/3T97d1B ) wired into the speaker outputs, I recommend taking a feed from the coil to the remote power input as the auto detect power isn’t great.
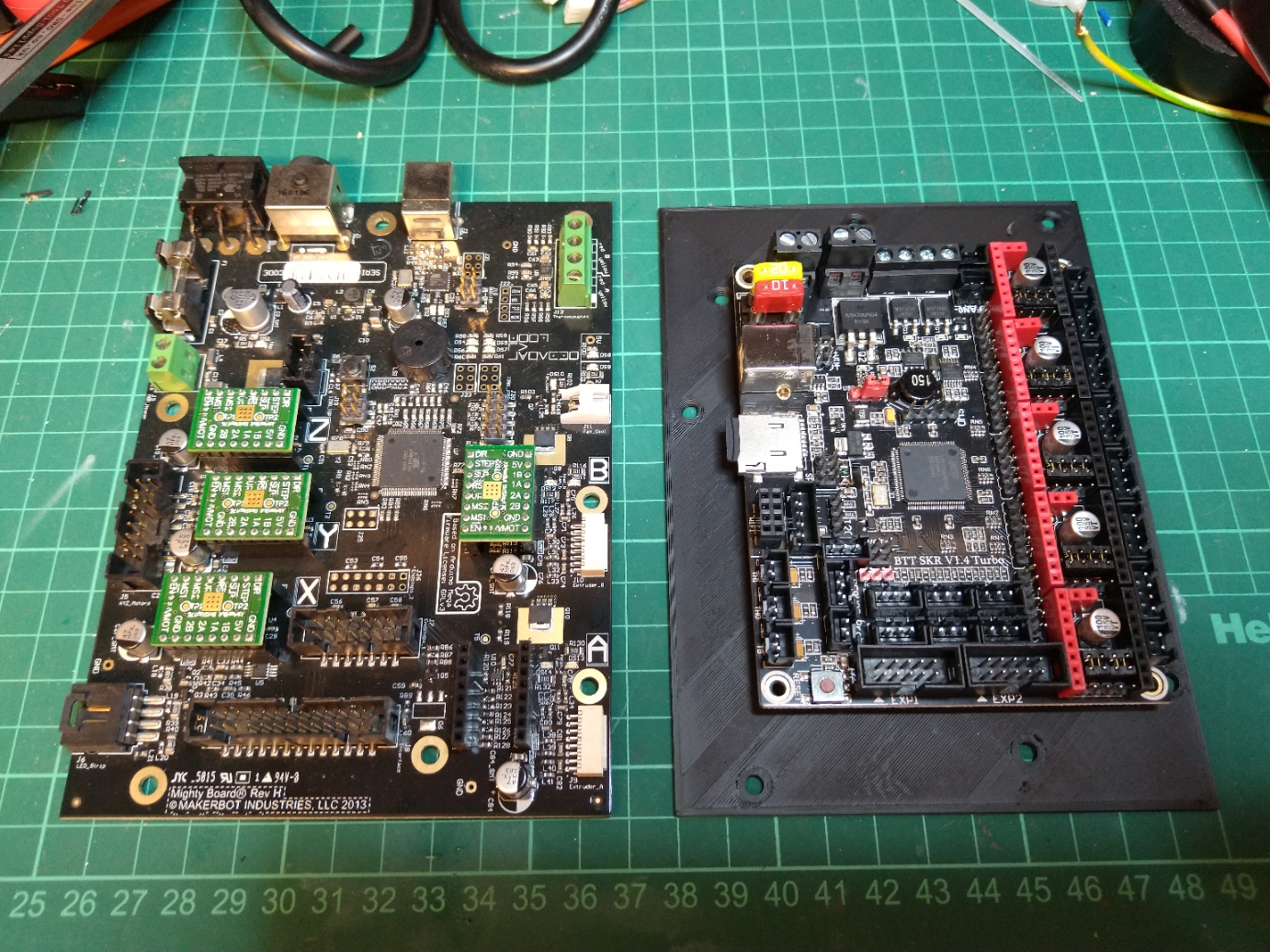
Last year I swapped the original mightyboard and botstep drivers from my replicator 2x over to a modern 32 bit board the bigtreetech SKR 1.4 turbo with 2.4″ TFT and converted it to a bowden setup.
Several people asked how so I’m going to attempt to write it it up. I will continue to add to this as I get time.
This is the basic process you need to follow if you want to do it like I have: – remove mightyboard c/w Botsteps – remove LCD and mount – remove original stepper motor wiring and replaced with generic ones. – cut connectors off the endstops and re-crimp JST connectors on instead. – fit 24vdc PSU under the bed – fit BTT SKR in place of mightyboard with 5 x drivers (I used TMC2208s in standalone mode) – add TFT24 mount and LCD – add extract fan to base – add thermistor to bed in place of the Makerbot one. – cut remaining connectors and changed to JST. – swap the the thermocouples for M3 thermistors (alternatively you can buy a thermocouple board for the SKR) – add mosfet for hotend fan control – edit and compile marlin firmware. Optional steps I undertook: – Converted to Bowden setup by changing the extruders for E3D Titan extruders and the Hotends for an E3D V6 Chimera hotend. – changed the LED strip over to NeoPixel. – made new lid.
JST Connectors and crimping: You will use allot of JST connectors if using the SKR turbo, it is really important that you practice crimping these and ensure you crimp the connectors well, I’m using a cheap ratchet crimper and its pretty rubbish but with practice I’ve managed to crimp the cables pretty well with them.
My conversion process explained: First job is one of the easiest parts of the process, remove all connectors from the the Mightyboard then pull it c/w Botsteps from the standoffs in the base, remove the front door and front panel then remove the LCD and mount.
Now you can remove the original stepper motor looms and replace them with generic ones, I used 4 x 1m and 1 x 0.25M for the Z motor.
At this point you can mount your PSU if you are using an internal one, I chose to screw mine through the base under the bed with 4 X M3 screws.
You can also mount the BTT TFT24 in the printed case now, this screws into the original mounting holes. Be sure to get the EXT connectors and the 5 pin one in the right order, I cut the black wires and crimped a JST connector on the smaller one to ensure that it couldn’t be reversed.
I mounted the BTT main board using standoffs drilled through the bed base but I have subsequently designed an adaptor that you can screw the BTT onto which then clips onto the original standoffs.
Once the new motherboard and TFT is mounted you can finish the wiring, you’ll need to cut the connectors off the Endstops and from the bottom of the extruder/hotend looms.
The Hotend heater cables can be wired directly into the board however the BTT SKR cannot read thermocouples without an additional board so I would swap them for M3 thermistors, you’ll need to crimp JSTs on the thermistor cables (Don’t worry about the polarity).
For the endstops you only need one ground as these are joined on the PCB so just connect the 5v to VCC, Gnd to Gnd and sig to the signal pin.
As the BTT SKR Turbo can only control one fan, I added a Mosfet for the extruder fans (covered in another post here) I also added an extract fan to the base to pull warm air away from the motherboard and PSU paralleled to the output of the mosfet.
I found once completed that the bed thermistor read very low, I think this is because of its placement within the silicone heat mat. I added a new 100K thermistor in the heat bed with a bit of thermal compound and aluminium tape to hold it onto the back of the bed surface, this now reads very accurately.
Firmware: Firstly I am not going to upload my complete firmware as its irrelevant unless you have literally the same setup as me plus If you can’t handle editing code and compiling it you shouldn’t be doing this conversion.
Marlin isn’t complicated and I’m not going into how to compile it but I will help with some useful snippets from mine.
Configuration.h
//Original Hotend Offsets
// Offset of the extruders (uncomment if using more than one and relying on firmware to position when changing).
// The offset has to be X=0, Y=0 for the extruder 0 hotend (default extruder).
// For the other hotends it is their distance from the extruder 0 hotend.
#define HOTEND_OFFSET_X { 0.0, 34.6 } // (mm) relative X-offset for each nozzle
#define HOTEND_OFFSET_Y { 0.0, 0.00 } // (mm) relative Y-offset for each nozzle
#define HOTEND_OFFSET_Z { 0.0, 0.00 } // (mm) relative Z-offset for each nozzle
//===========================================================================
//============================== Endstop Settings ===========================
//===========================================================================
// @section homing
// Specify here all the endstop connectors that are connected to any endstop or probe.
// Almost all printers will be using one per axis. Probes will use one or more of the
// extra connectors. Leave undefined any used for non-endstop and non-probe purposes.
//#define USE_XMIN_PLUG
#define USE_YMAX_PLUG
#define USE_ZMIN_PLUG
#define USE_XMAX_PLUG
//#define USE_YMAX_PLUG
//#define USE_ZMAX_PLUG
// Enable pullup for all endstops to prevent a floating state
#define ENDSTOPPULLUPS
#if DISABLED(ENDSTOPPULLUPS)
// Disable ENDSTOPPULLUPS to set pullups individually
//#define ENDSTOPPULLUP_XMAX
//#define ENDSTOPPULLUP_YMAX
//#define ENDSTOPPULLUP_ZMAX
//#define ENDSTOPPULLUP_XMIN
//#define ENDSTOPPULLUP_YMIN
//#define ENDSTOPPULLUP_ZMIN
#define ENDSTOPPULLUP_ZMIN_PROBE
#endif
// Enable pulldown for all endstops to prevent a floating state
//#define ENDSTOPPULLDOWNS
#if DISABLED(ENDSTOPPULLDOWNS)
// Disable ENDSTOPPULLDOWNS to set pulldowns individually
//#define ENDSTOPPULLDOWN_XMAX
//#define ENDSTOPPULLDOWN_YMAX
//#define ENDSTOPPULLDOWN_ZMAX
//#define ENDSTOPPULLDOWN_XMIN
//#define ENDSTOPPULLDOWN_YMIN
//#define ENDSTOPPULLDOWN_ZMIN
//#define ENDSTOPPULLDOWN_ZMIN_PROBE
#endif
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup).
#define X_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define Y_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define Z_MIN_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define X_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define Y_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define Z_MAX_ENDSTOP_INVERTING true // Set to true to invert the logic of the endstop.
#define Z_MIN_PROBE_ENDSTOP_INVERTING true // Set to true to invert the logic of the probe.
// @section machine
// Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way.
#define INVERT_X_DIR true
#define INVERT_Y_DIR true
#define INVERT_Z_DIR true
// @section homing
// Direction of endstops when homing; 1=MAX, -1=MIN
// :[-1,1]
#define X_HOME_DIR 1
#define Y_HOME_DIR 1
#define Z_HOME_DIR -1
// @section machine
// The size of the print bed
#define X_BED_SIZE 235
#define Y_BED_SIZE 150
// Travel limits (mm) after homing, corresponding to endstop positions.
#define X_MIN_POS 0
#define Y_MIN_POS 0
#define Z_MIN_POS 0
#define X_MAX_POS 235
#define Y_MAX_POS 150
#define Z_MAX_POS 150
Configuration_adv.h
#define E0_AUTO_FAN_PIN P1_00
That is kind of it for the basics, I’ll try to add any more information as I think of it but there should be enough here to get you through a conversion, I’ll try and write up my bowden conversion soon.
When I built my Replicator 2X using a BTT SKR 1.4 Turbo I was disappointed to learn that only one of the three fans is controllable.
Makerbot Replicator 2X with BTT SKR
I really wanted an automatic extruder fan and with an external MOSFET it’s a really simple thing to setup.
DF Robot MOSFET
All you need to do is connect a MOSFET to a spare pin (I chose the power detect plug).
Using a DFRobot GRAVITY MOSFET (other brands are available) I connected the red to 5v, black to GND and green to pin 1.00
Pwr Detect plug
I connected the fan to the output of the mosfet using the output from fan1 for the VIN but you could obviously use your PSU aswell (Make sure this is the correct voltage for the fan!!)
In configuration.adv I changed the extruder fan pin to “P1_00” from “-1” compiled Marlin, uploaded it and bingo!
Automatic fan on extruder 1!
Really simple and well worth it!
Manage Consent
To provide the best experiences, we use technologies like cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting or withdrawing consent, may adversely affect certain features and functions.
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.